Robot con detector de proximidad mediante ultrasonidos al que nos referimos en este artículo ya montado y funcionando, nuestro objetivo es el ir probando el funcionamiento de diferentes Shields y aprender a utilizarlos en otros proyectos.
Robot con detector de proximidad mediante ultrasonidos al que nos referimos en este artículo ya montado y funcionando, nuestro objetivo es el ir probando el funcionamiento de diferentes Shields y aprender a utilizarlos en otros proyectos.
Parte del software se basa en el artículo indicado, pero se ha modificado para adaptarlo al tipo de robot utilizado, el modelo original utilizaba servos de rotación continua y los he substituido por dos motores estandar de 5 a 9 voltios.
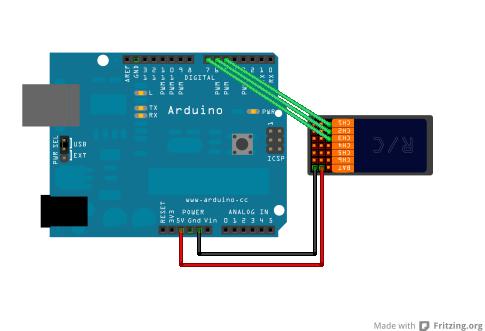
También he añadido una plataforma de cámara con dos servos, para poder orientar el sensor de distancia en cualquier posición, así tambien podemos medir la altura de los obstáculos.
En esta primera versión de código seguimos con un software básico, como para que el robot se mueva por una habitación con bastante fluidez y sin demasiados problemas con los obstáculos.
Iremos avanzando con el software y añadiéndole algunas nuevas shields para mejorar su «inteligencia» y operatividad.
Seguir leyendo Robot con Arduino y sensor ultrasónico para calcular las distancias a los objetos cercanos y evitarlos