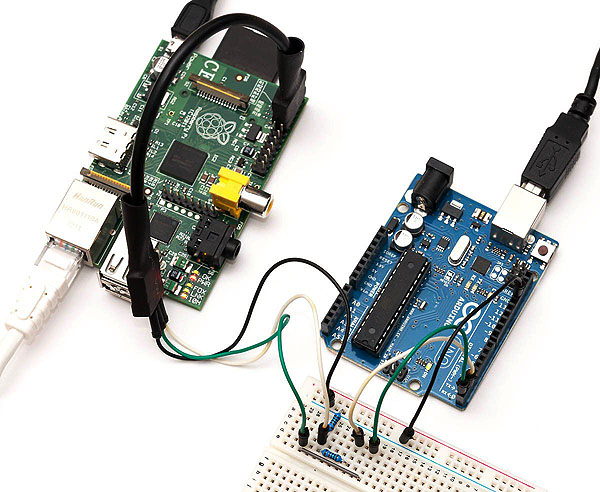
Un artículo imprescindible para conectar los dos más importantes dispositivos del mundo Open Source como son RaspberryPi y Arduino.
Vamos a llevar a cabo una comunicación serie entre ambos dispositivos, veremos que archivos debemos modificar en RaspberryPi para que esto sea posible, como solventar un punto de conflicto como son los niveles de tensión y todo esto lo hacemos como siempre, seguido de varios ejemplos y un pequeño documento que podéis descargar .
Seguir leyendo Tutorial para conectar un Arduino con Raspberry PI por puerto serie.